
9 décembre 2022
It will be difficult for me to pick my favorite module from all Ublox GNSS modules, but without a doubt NEO-M8L ADR module is on top of the list along with UDR version NEO-M8U. So, it was exciting to get hands on the new ADR/UDR module based on M9 family NEO-M9V with all the additional features that this module is capable of, such being able to track concurrently all 4 major constellations (GPS, GLONASS, BeiDou and Galileo), Advanced calibration handling and weak signal compensation.
So, the anticipation to test this device triggered the idea for this little project, where the main purpose is to have an evaluation platform that:
– Can demonstrate UDR functionality (so without the use of wheel tick signal).
– Free from any wiring, including the USB connection to the laptop and the antenna. The idea here is to use the USB connector available in every modern car to power-up the device and to receive all navigation data over Bluetooth. This is the main difference to the EVK already available that will require an USB connection to u-center and have to be fixed in the car using double sided tape or zip ties, with this design the communication will be wireless and the device will be fixed and powered up by simply being plugged into the USB socket.
– Give a general idea on the performances even with a less than perfect design when it comes to the antenna integration, and depending on the quality of the USB socket it can induce an undesirable vibration on the integrated IMU. So, while datasheet will present results in most favorable conditions, I chose to check the other end of the spectrum and see how well a purposefully imperfect design will perform, as it’s the case for many consumer or commercial grade products that will have to compromise to fit all the design requirements.
– Demonstrate the ease with which a system can be put together using highly integrated Ublox modules and couple of external components, and how easily the UDR solution provided by Ublox can be implemented.
System description
The design is based on two modules:
NEO-M9V, GNSS receiver with UDR capability (and ADR too but this will not be the subject of this demo). A major advantage compared to M8 DR modules is that integrate SAW and LNA so the use of a passive antenna is possible and reduce RF design efforts.
https://www.u-blox.com/en/product/neo-m9v-module
NINA-W152, a stand-alone multiradio module, flashed with u-connect software. This module integrates the antenna and the software needed to setup an SPP link with the laptop. No much effort is needed to run this module.
https://www.u-blox.com/en/product/nina-w15-series-u-connect
Block diagram
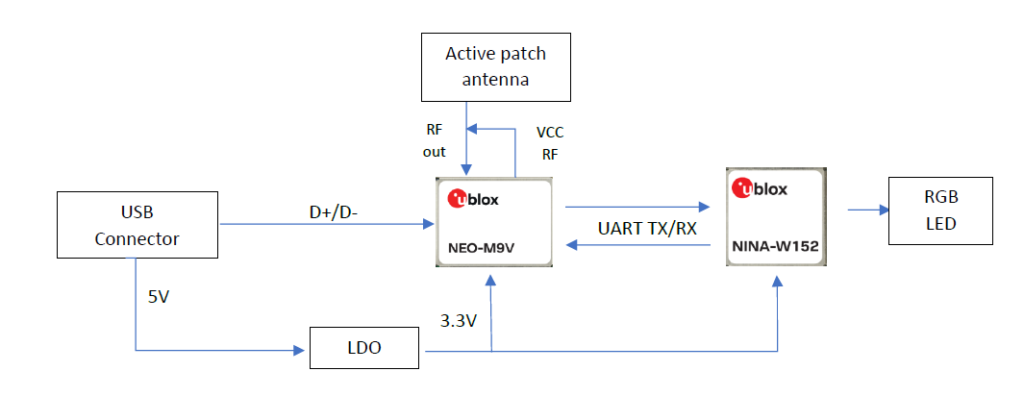
The design is straightforward,
- The USB connector will provide power to both NEO-M9V and NINA-W152. The data lines are connected to the USB interface of the NEO-M9V to configure it, receive navigation data, debug.
- The antenna is connected with an U.FL connector so during test we can use either internal active antenna or external antenna fixed on the roof of the car. The active antenna is powered by VCC_RF pin which is a filtered power output.
- NINA-W152 is used as a transparent Bluetooth serial link with the laptop. It’s configured to start automatically in Data mode and 921600 baudrate. The configuration is stored in flash, so it only has to be done once. In this case, it was configured with an FTDI USB to serial converter through test points.
- An RGB Led is connected to the NINA-W1 to report the data link status and activity, it will blink at the same frequency as the navigation rate.
The device



Driving tests
Test conditions
The NEO-M9V is running on its default configuration with the exception of UART interface baud rate and enabled messages over UART. For those tests we will be looking at UBX-NAV and UBX-ESF class messages to monitor IMU alignment and calibration status, fusion mode status and navigation data.

During this test the module will start in an urban environment, wait for a fix, drive around until calibration than move into a covered parking.
Phase 1 : Calibration
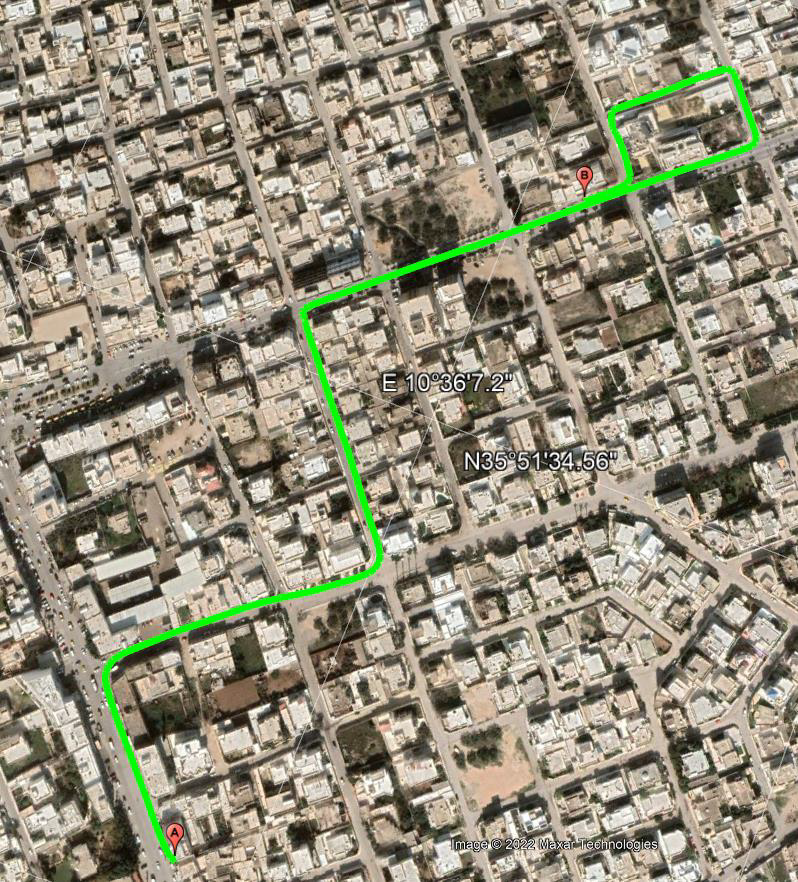
The calibration took 202 seconds and around 1.18 Km. A good reception will help accelerate this phase, in this case the coverage as expected was not exceptional with an average of 27.94 dbHz and to perform acceleration, braking, turn left and right, which is easily achievable in an urban environment. Maximum speed around 40 Km/h and the average 19.36 Km/h, the recommended speed for calibration in u-blox documentation is 40 Km/h.
Phase 2 : 3D+DR
Driving around in 3D+DR mode, uneventful. Travailed a distance of around 8Km, 3D average estimated accuracy is 8.2m, average C/N0 is around the same as before 27.54dBHz and maximum tracked SVs is 31.
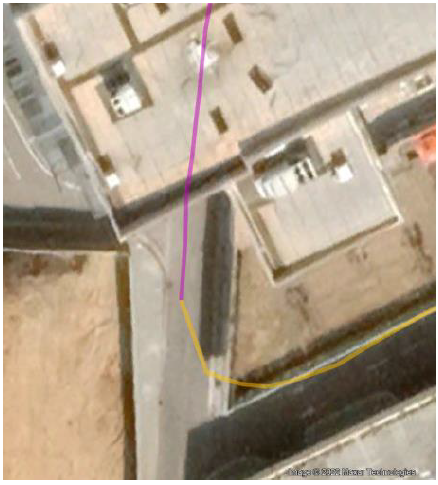
Phase 3 : DR mode

As soon as the module lost GNSS signals when entering the covered parking, it switched to DR. The navigation is amazingly accurate compared to the real circuit the car took.
I didn’t expect that the module will handle passing over speed bump as well as it did. That surely caused a position jump but in the next position jumped back to the right track. This kind of event can add an offset to whatever solution the module is calculating.
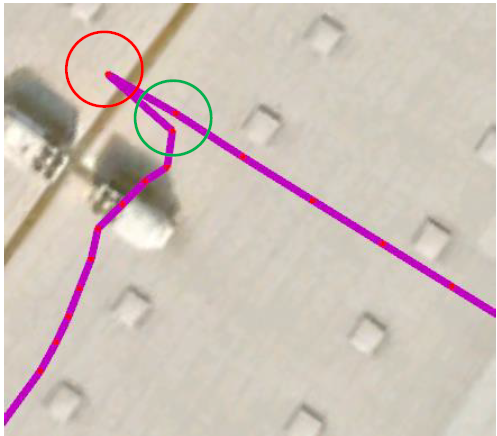
This is the money shot, the position when exiting the parking was spot on, this can be confirmed by the continuity between the DR solution and 3D+DR once the module detected GNSS signals again when exiting the parking.
No position jump between le last DR solution and the GNSS fixed solution when moving out of the parking. Which tend to be the case when a DR module correct its position using GNSS signal once available.
The DR drive took around 170 seconds, with practically no noticeable accumulated error , the end result is almost too good considering that the datasheet indicate 10% error for less than 60 seconds drive.
Conclusions:
Despite the restrictive design when it comes to the antenna size, ground plane and placement, the module is sensitive enough to provide reliable positioning even with such degraded reception conditions .
The device mounting venerable to vibrations, and the driving circuit that present some challenges for a DR navigation (multiple turns, speed bumps) prove how robust the DR solution developed by U-blox.
I think the end result is impressive and will fit most commercial application that require DR navigation.
On the other hand, the « u-connect » software is certainly a time to market booster and help develop application in a blink of an eye. The features that this module offer surly please Engineers with hardware background as myself to develop application with zero software.
Hope this article will help any product designer or project manager to understand what to expect from this positioning module, and how Ublox modules can be combined to design a time to market optimized solutions.
Disclaimer
- Test results shown in this article are only indicative, tests were performed in uncontrolled environment, repeatability is not guaranteed.
- This article is in noway an encouragement to develop applications without considering the recommendations of the Hardware Integration Manual of the GNSS module and the antenna manufacturer. The performance indicators provided in the datasheet can be only guaranteed by following the manufacturer recommendations.
Laisser un commentaire